A RIC (RAN Intelligent Controller) működésének jobb megértésében segít a SON és a RIC közötti hasonlóság illetve különbség ismerete. A RIC, ha beválik, a régebbi SON (Self Organizer Network) önvezérlő hálózat technológiát kívánja felváltani, amelyet a RAN hálózatok managelésére használnak. A SON már néha túl összetetté, bonyolultá vált a hálózat üzemeltetők számára, és a rendszeres változtatások manuális konfigurálására távolról sem ideális ha feltételezzük, hogy az üzemeltető folyamatosan optimális teljesítményt szeretne elérni az egész hálózatban.
SON Verziók
Kétféle SON verzió létezik jelenleg: centralizált SON (C-SON) és elosztott SON (D-SON).
Elosztott D-SON
Ezt általában nem külön álló egység, hanem beépítik a BBU-ba, mint például az Ericsson és a Nokia. A D-SON beépített szoftver optimalizálja a BBU olyan funkcióit, mint Beamforming vagy Scheduling.
Központi C-SON
A C-SON központi helyet foglal a szervereken, és több rádióeszközt is felügyel. Hálózati információkat gyűjt, számításokat végez, majd a paraméterek módosítására vonatkozó utasításokat hajt végre.
RIC Verziók
Non-Real Time RIC
A Non-RT RIC a Service Management and Orchestration (SMO) Framework része, amely lehetővé teszi a RAN eszközök és erőforrásaik nem valós idejű (> 1 másodperces) vezérlését rApps alkalmazásokon keresztül.
Near-Real Time RIC
A Near-RT RIC logikai funkció az O-CU és O-DU funkciók közel valós idejű optimalizálását, vezérlését és monitorozását végzi közel Real Time időben (10 ms és 1 s között). A near-RT RIC vezérlését adatvezérelt AI/ML alapú tanított modellek, policy-k irányítják. A near-RT RIC egyik fő fuknciója a rádióerőforrás management (RRM).
SON vs. RIC
A SON egyik nagy problémája a különböző gyártói rendszerek közötti inkompatibilitása. A másik, hogy a teljes vezérlési ciklus a C-SON-ban körülbelül 15 percet vesz igénybe, ami nem biztosítja az üzemeltetők számára a „valós idejű” frissítési képességet.
A RIC koncepcióban a C-SON helyett egy nem valós idejű non-RT RIC található, amely egy központi szerveren fut. A közel valós idejű near-RT RIC-ek lecserélik a D-SON-t a BBU-n belül. A nyitott rendszerek támogatói számára a legfontosabb különbség a SON-hoz képest a két RIC funkció közötti interoperabilitás az O-RAN Alliance által kidolgozott interfészeknek köszönhetően. Mind a non-RT és near-RT RIC képes több gyártó eszközeinek kombiált kezelésére biztositva ezzel az O-RAN alapkoncepcióját.
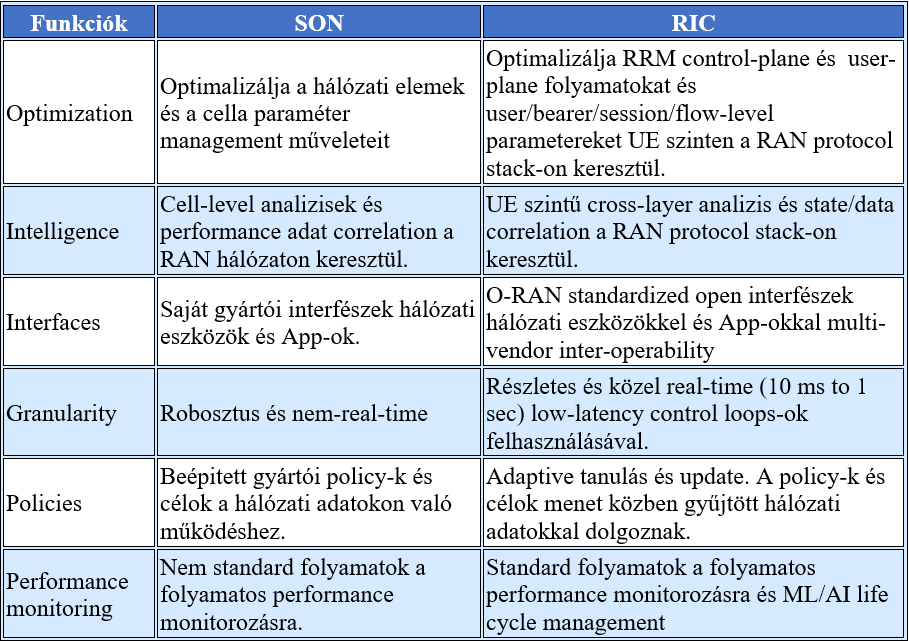
Az alábbi táblázat összefoglalja a fontosabb funkciók közötti eltérést a SON és RIC között.